|
3229| 0
|

[НЛСї] ЪїнЎХЩЪгЦЕаЁГЕНЬГЬ |
| ||
ЯрЙиЬћзг
|
||
аЁКкЮн|ЪжЛњАц|Archiver|ЪїнЎХЩТлЬГ
( дСICPБИ15075382КХ-1 ) 
GMT+8, 2024-11-26 04:02 , Processed in 1.109375 second(s), 30 queries , Gzip On.
Powered by Shumeipai.net! X3.2
© 2001-2015 ЪїнЎХЩТлЬГЃЌАВШЋСЊУЫ


 ЗЂБэгк 2016-12-29 13:31:13
ЗЂБэгк 2016-12-29 13:31:13
 ЫљвдЮвУЧПЩвджЊЕР@app.route('/XXX')РяУцXXXЪЧТЗОЖУћЃЌЕБФуЗУЮЪВЛЭЌЕФТЗОЖЪБЃЌФуПЩвдЭЈжЊRaspberyyжДааВЛЭЌЕФЖЏзїЃЁ
ЫљвдЮвУЧПЩвджЊЕР@app.route('/XXX')РяУцXXXЪЧТЗОЖУћЃЌЕБФуЗУЮЪВЛЭЌЕФТЗОЖЪБЃЌФуПЩвдЭЈжЊRaspberyyжДааВЛЭЌЕФЖЏзїЃЁ
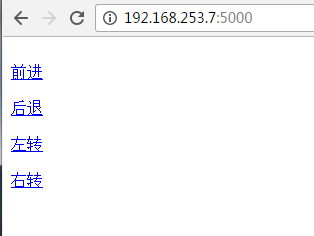 ЕБФуЕуЛїВЛЭЌЕФбЁЯюЪБЃЌБуЛсЬјзЊЕНЖдгІЕФURLжаЃЁ
ЕБФуЕуЛїВЛЭЌЕФбЁЯюЪБЃЌБуЛсЬјзЊЕНЖдгІЕФURLжаЃЁ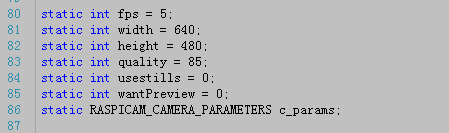 ЮЊСЫБЃеЯЪгЦЕДЋЪфСїГЉЃЌНЈвщАбfpsЕїЕН30зѓгвНЯКУЃЁ
ЮЊСЫБЃеЯЪгЦЕДЋЪфСїГЉЃЌНЈвщАбfpsЕїЕН30зѓгвНЯКУЃЁ